Humanoid robots are entering a critical transition period.
After years of laboratory demonstrations, the industry is now moving toward pilot production, factory trials, and early commercial deployment. The key question is no longer simply whether humanoid robots can walk, grasp, perceive, and interact.
The real question is:
Can the supply chain support reliable, repeatable, and cost-effective production at scale?
In 2026, the humanoid robot industry is expected to be shaped by three major forces:
- Rapid progress in embodied AI
- Higher-performance electromechanical components
- Manufacturing scale-up by leading robot companies

For component suppliers, OEMs, system integrators, and procurement teams, humanoid robots are creating a new sourcing landscape across upstream hardware, midstream integration, and downstream applications.
In simple terms, the industry is moving from “can move” to “usable, easy to use, and durable.”
That sounds like a small change. It is not.
It is the difference between a robot that looks impressive on stage and a robot that can work every day in a factory, warehouse, hospital, hotel, or home.
Key Takeaways
- Humanoid robots are evolving from prototype demonstrations toward early scalable production.
- Dexterous hands, joint modules, sensors, actuators, reducers, AI chips, flexible PCBs, and lightweight materials are becoming key value areas.
- The current industry stage is roughly between G2 general atomic skills and G3 end-to-end operational skills.
- General-purpose humanoid robots and specialized robots require different supply chain strategies.
- Procurement teams should evaluate not only price, but also reliability, traceability, lead time stability, engineering support, and system compatibility.
- The winners may not be only robot brands. Many hidden champions will come from component suppliers.
The 2026 Humanoid Robot Value Chain
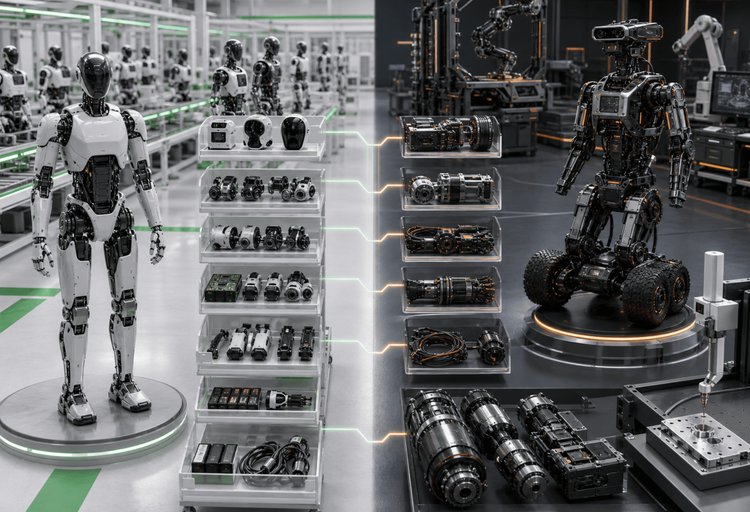
The humanoid robot supply chain can be divided into three layers:
- Upstream suppliers
- Midstream integration companies
- Downstream application markets
Each layer plays a different role in moving humanoid robots from engineering prototypes to commercial products.
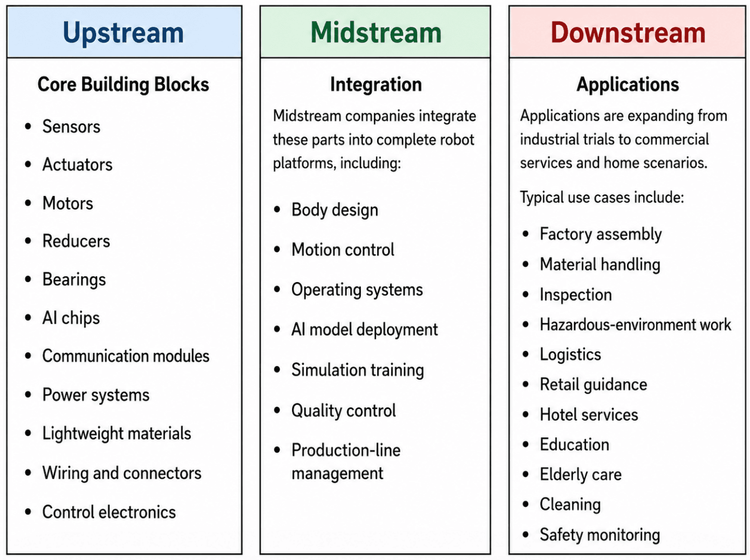
Upstream Suppliers: Core Building Blocks
Upstream suppliers provide the core building blocks of humanoid robots.
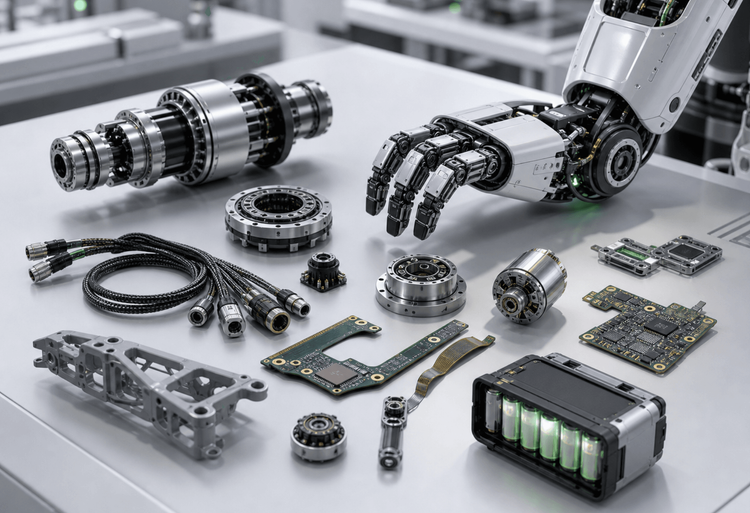
These include:
- Sensors
- Actuators
- Motors
- Reducers
- Bearings
- AI chips
- Communication modules
- Power systems
- Lightweight materials
- Wiring and connectors
- Control electronics
Humanoid robots are not just “robots with a human shape.” They are dense electromechanical systems that require the coordination of perception, motion control, power management, computing, structure, and software.
A small failure in one component can affect the entire robot.
For example:
- A poor torque sensor reduces grasping accuracy.
- A low-quality reducer increases backlash and motion instability.
- An unreliable flexible PCB can fail after repeated bending.
- A weak thermal design can reduce actuator life.
- An unstable power system can limit working time.
This is why upstream component quality will become one of the most important competitive factors in humanoid robotics.
Midstream Integration: Turning Components Into Robot Platforms
Midstream companies integrate upstream components into complete robot platforms.
This layer includes:
- Body design
- Motion control
- Operating systems
- AI model deployment
- Simulation training
- Quality control
- Production-line management
Midstream integration is where the robot becomes more than a collection of parts.
A humanoid robot needs to coordinate:
- Perception
- Planning
- Balance control
- Arm movement
- Finger control
- Human-machine interaction
- Power consumption
- Real-time feedback
This is why midstream companies need strong capabilities in both hardware engineering and AI software.
The challenge is not only to make a robot move.
The harder challenge is to make it move smoothly, safely, repeatedly, and economically.
Downstream Applications: From Factory Trials to Real-World Use
Downstream applications are expanding from industrial trials to commercial services and home scenarios.
Typical use cases include:
- Factory assembly
- Material handling
- Inspection
- Hazardous-environment work
- Logistics
- Retail guidance
- Hotel services
- Education
- Elderly care
- Cleaning
- Safety monitoring
In the early stage, industrial and commercial environments are likely to be more realistic than household scenarios.
Why?
Because factories and warehouses usually have clearer tasks, more structured environments, and stronger willingness to pay. Home scenarios are attractive, but they require much higher standards for safety, cost, noise control, battery life, user experience, and emotional interaction.
The home robot market is huge, but it is also a harder exam. No teacher gives partial credit at home.
Core Hardware: Where Robot Performance Is Decided
A humanoid robot is a high-density system of motors, reducers, sensors, controllers, chips, structural parts, cables, and software.
Among all hardware modules, several areas deserve special attention.
Dexterous Hands: The Next Key Battlefield
The dexterous hand is one of the most important subsystems in humanoid robots.
Walking makes a robot look like a human.
But grasping, manipulating, and using tools make it useful.
A dexterous robotic hand may include:
- Fingertip tactile sensor arrays
- Tendon-driven systems
- Micro actuators
- Joint torque sensors
- Flexible circuit boards
- Embedded controllers
- Micro motors
- Micro ball screws
- Lightweight structural frames
- Flexible wrist joints
Future dexterous hands are expected to support:
- More degrees of freedom
- More accurate force feedback
- Faster response speed
- Higher durability
- Better task adaptability
- Lower weight
- Lower manufacturing cost
The direction is clear: robotic hands need to become not only more capable, but also more manufacturable.
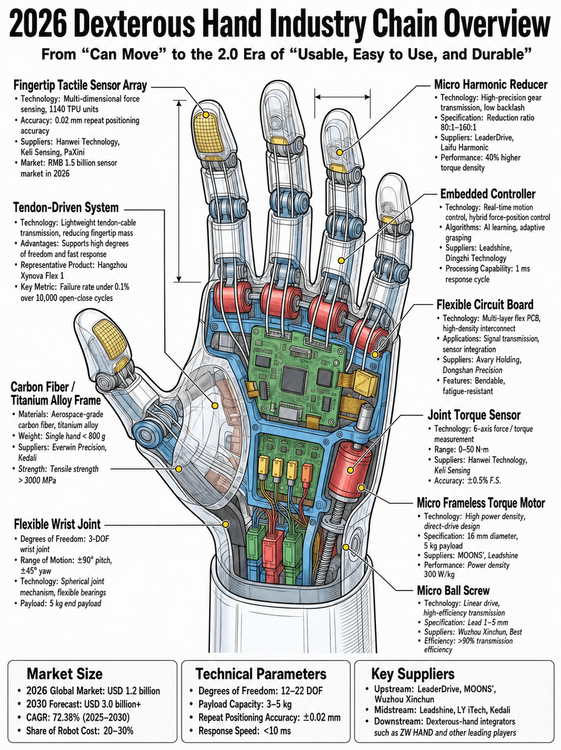
Key Dexterous Hand Components
Fingertip Tactile Sensor Array
Fingertip tactile sensors help the robot detect force, pressure, texture, and contact changes.
They are critical for:
- Grasping fragile objects
- Adjusting grip force
- Detecting slippage
- Performing precise manipulation
- Improving human-robot interaction safety
Without tactile feedback, a robot hand may hold an egg like a stone or hold a tool like a wet fish.
Tendon-Driven System
Tendon-driven systems use cable-like transmission structures to reduce fingertip mass and improve flexibility.
Advantages include:
- Lightweight design
- Better finger flexibility
- Higher degrees of freedom
- Fast response
- More human-like motion
This design is especially valuable when the hand needs to perform delicate tasks while keeping the actuator mass away from the fingertips.
Micro Harmonic Reducer
Micro harmonic reducers provide high-precision transmission in compact spaces.
Key requirements include:
- Low backlash
- High torque density
- Small size
- High reliability
- Long service life
They are important for finger joints, wrist joints, and compact actuation systems.
Embedded Controller
The embedded controller is the local “brain” of the hand.
It handles:
- Real-time motion control
- Hybrid force-position control
- Sensor data processing
- Adaptive grasping
- Communication with the robot body
For dexterous hands, response time matters. A delay of only a few milliseconds can affect grasping stability.
Flexible Circuit Board
Flexible circuit boards are used for signal transmission and sensor integration in compact moving structures.
They need to be:
- Bendable
- Fatigue-resistant
- Thin
- Reliable
- Suitable for high-density interconnection
In robotic hands, flexible PCBs are not optional decorations. They are survival equipment.
Joint Torque Sensor
Joint torque sensors measure force and torque at robot joints.
They help improve:
- Force control
- Safety
- Grasping precision
- Compliance control
- Motion feedback
For humanoid robots working near humans, force sensing is not just about performance. It is also about safety.
Micro Frameless Torque Motor
Micro frameless torque motors provide compact, high-power-density motion output.
Important requirements include:
- High power density
- Compact design
- Low heat generation
- Direct-drive capability
- Stable long-term operation
These motors are key components in joint modules and robotic hands.
Micro Ball Screw
Micro ball screws convert rotary motion into precise linear motion.
They can support:
- High-efficiency transmission
- Compact linear drive
- High precision
- Strong load capacity
- Durable repetitive motion
They are especially useful in small robotic actuation systems where space is limited but precision is required.
Carbon Fiber and Titanium Alloy Frame
Lightweight structural materials are essential for humanoid robots.
Common materials include:
- Carbon fiber composites
- Aluminum alloys
- Titanium alloys
- Engineering plastics
- High-performance polymers
The goal is to reduce weight while maintaining strength and safety.
A lighter robot is easier to move, consumes less energy, and places less load on motors, reducers, bearings, and batteries.
Joint Modules: The Cost and Performance Center
Joint modules are another critical part of humanoid robots.
A typical joint module may include:
- Motor
- Reducer
- Bearing
- Encoder
- Torque sensor
- Controller
- Thermal management system
The key performance indicators include:
- High torque density
- Low backlash
- Low noise
- High precision
- Long service life
- Good heat dissipation
- Compact structure
Joint modules directly affect walking stability, arm movement, load capacity, balance control, and manipulation accuracy.
In humanoid robots, the joint is not just a mechanical part.
It is where mechanical engineering, electronics, control algorithms, and manufacturing quality meet.
Perception Systems: From Seeing to Understanding
Perception systems allow humanoid robots to understand their surroundings.
They may include:
- Cameras
- Tactile sensors
- Force sensors
- IMUs
- Depth cameras
- LiDAR
- Vision algorithms
Many industry roadmaps are moving toward vision-first perception systems supported by end-to-end neural networks and real-time decision systems.
However, vision alone is not enough.
A humanoid robot also needs force feedback, tactile feedback, balance sensing, and environmental awareness. The stronger the perception system, the better the robot can adapt to complex tasks.

Embodied AI: The Real Upgrade
The next major leap is embodied intelligence.
Unlike traditional industrial robots, humanoid robots must interact with open physical environments. They need to perceive, plan, learn, and execute tasks through a physical body.
The technology stack can be understood as two connected layers.
High-Level Layer
This layer handles:
- Task planning
- Task decomposition
- Perception
- Reasoning
- Decision-making
Low-Level Layer
This layer handles:
- Motion control
- Movement execution
- Feedback
- Correction
- Force control
Large multimodal models are becoming the reasoning layer for humanoid robots.
Robot-specific models, reinforcement learning, imitation learning, and simulation training help translate decisions into physical actions.
In other words:
Large models help robots understand what to do.
Motion control systems help robots actually do it.
One is the brain. The other is the body.
A robot needs both.
The G1–G5 Evolution Path of General-Purpose AI Robots
The development path of humanoid robots can be described in five stages.
| Stage | Name | Capability | Typical Description |
|---|---|---|---|
| G1 | Basic Automation | Fixed programmed tasks | Traditional industrial robot style automation |
| G2 | General Atomic Skills | Reusable basic skills | Picking, placing, simple movement, basic task generalization |
| G3 | End-to-End Operation Skills | Complete task learning | Robots learn relatively complete tasks from data |
| G4 | General-Purpose Operation Large Model | Multi-step planning | Robots understand complex instructions and execute multi-step tasks |
| G5 | Embodied AGI | Broad adaptation | Robots adapt to many environments and tasks with human-level flexibility |
Current advanced humanoid robots are generally still around the transition from G2 to G3.
That means the industry is not yet at the “one robot does everything” stage.
But it is moving from single-function demonstrations toward task-level usefulness.
This transition is extremely important for the supply chain because each stage creates different component requirements.
Historical Development: From Early Concepts to Industrialization
The development of humanoid robots did not happen overnight.
It can be roughly divided into three stages.
1950s–1990s: Early Exploration and Theory
This stage focused on basic robotics concepts and early humanoid prototypes.
Important directions included:
- Robot morphology
- Basic automation theory
- Early bipedal walking research
- Mechanical structure experiments
During this period, humanoid robots were more about proving concepts than solving commercial problems.
2000–2022: Technology Accumulation and Multidisciplinary Integration
This period saw major progress in:
- Dynamic control
- Balance technology
- Reinforcement learning
- Sensor fusion
- Motion planning
- Simulation
- High-performance actuators
Robots such as advanced quadrupeds and humanoid research platforms showed that robots could move more dynamically and handle more complex terrain.
This stage laid the technical foundation for today’s humanoid robot boom.
2022–Present: Large Model-Driven Acceleration
After 2022, large AI models started to change the logic of robot development.
Key trends include:
- Multimodal AI models
- Robot foundation models
- Simulation-to-real training
- Vision-language-action models
- Faster iteration of general-purpose robot platforms
This stage is pushing humanoid robots from “mechanical performance competition” toward “intelligence and application competition.”
General-Purpose Robots vs Specialized Robots
Different robot strategies create different supply chain requirements.
The market is roughly forming two major directions:
- General-purpose humanoid robots
- Specialized robots
General-Purpose Humanoid Robots
General-purpose humanoid robots prioritize:
- Adaptability
- Flexibility
- Low cost
- Scalable production
- Energy efficiency
- Human-like form
- Multi-scenario deployment
Their design usually emphasizes:
- Lightweight structures
- Integrated actuators
- Multimodal sensors
- AI chips
- Standardized components
- Manufacturable materials
- Cost-controlled supply chains
Tesla Optimus is a representative example of this direction.
The goal is not to build the most extreme robot in every performance dimension.
The goal is to build a robot that can be produced at scale, deployed widely, and improved continuously.
For this path, supply chain priorities include:
- Standardization
- Vertical integration
- Cost reduction
- Stable mass production
- Consumer electronics-style supply chain efficiency
Specialized Robots
Specialized robots prioritize:
- Reliability
- Precision
- Durability
- Task-specific performance
- Advanced mobility
- Harsh-environment capability
Their supply chains rely more heavily on:
- Customized motors
- Precision reducers
- Dedicated sensors
- High-strength materials
- Specialized controllers
- Structural customization
- Strict performance validation
Boston Dynamics is often associated with this path, especially in dynamic mobility and complex terrain performance.
Specialized robots are not necessarily cheap or easy to mass-produce. But they can perform difficult tasks in specific environments where general-purpose robots may not yet be good enough.
Supply Chain Differences Between the Two Strategies
| Dimension | General-Purpose Humanoid Robots | Specialized Robots |
|---|---|---|
| Core Demand | Adaptability, flexibility, low cost, scalability | Reliability, precision, durability, task-specific performance |
| Design Focus | Human-like form, lightweight structure, energy efficiency | Functional design, structural strength, easy maintenance |
| Material Selection | Balanced use of aluminum, polymers, composites | High-performance alloys, engineering polymers, special materials |
| Core Components | Integrated actuators, multimodal sensors, AI chips | Customized motors, reducers, controllers, dedicated sensors |
| Supply Chain Feature | Vertical integration, scale effect, consumer electronics overlap | Professional, customized, high-value, strict process requirements |
| Best Fit | Broad industrial and service scenarios | High-difficulty or high-reliability scenarios |
For procurement teams, this distinction matters.
A supplier suitable for a general-purpose robot may not be suitable for a specialized robot.
A supplier suitable for prototypes may not be ready for mass production.
This is where many robot companies will eventually pay tuition fees. Expensive tuition fees.
Application Scenarios Are Expanding
Industrial Manufacturing
Industrial manufacturing remains one of the most important early markets.
Humanoid robots can support:
- Flexible production
- Factory logistics
- Machine tending
- Assembly assistance
- Quality inspection
- Repetitive manual tasks
Factories are attractive because tasks are more structured and ROI can be measured more clearly.
Logistics and Warehousing
Logistics and warehousing are another promising direction.
Potential tasks include:
- Sorting
- Loading
- Unloading
- Picking
- Moving goods
- Repetitive transfer tasks
Warehouses often involve repetitive manual work, which makes them suitable for early humanoid robot deployment.
Hazardous-Environment Work
Humanoid robots may also be used in dangerous environments, such as:
- High-temperature areas
- Toxic environments
- Disaster response
- Inspection of dangerous equipment
- Remote operation in unsafe locations
In these scenarios, the value of replacing humans is not only efficiency, but safety.
Commercial Services
Commercial service scenarios may include:
- Retail guidance
- Hotel services
- Exhibition services
- Education and training
- Visitor reception
These scenarios require good human-machine interaction, natural language capability, stable movement, and safe behavior.
Home Services
Home applications may include:
- Cleaning
- Elderly care
- Companionship
- Safety monitoring
- Simple household assistance
However, home scenarios remain difficult because users expect low price, high safety, low noise, long battery life, and strong adaptability.
A factory may tolerate a robot that needs engineering support.
A family probably will not.

What This Means for Component Sourcing
As humanoid robots move toward scale, supply chain quality will become a decisive advantage.
Buyers should evaluate more than unit price.
Important sourcing factors include:
- Lifecycle reliability
- Product traceability
- Engineering support
- Lead time stability
- Batch consistency
- Certification support
- Customization capability
- Compatibility with system-level design
- Long-term supplier financial stability
In robotics, the cheapest component is not always the lowest-cost component.
If a low-cost part causes field failures, production delays, or safety risks, the real cost can be much higher.
High-Priority Sourcing Areas in 2026
The following component categories are likely to receive strong attention from humanoid robot OEMs and integrators:
- High-torque-density motors
- Joint actuators
- Precision reducers
- Micro harmonic reducers
- Micro ball screws
- Torque sensors
- Force sensors
- Tactile sensors
- Vision sensors
- IMUs
- AI chips
- MCUs
- Power devices
- Control boards
- Flexible PCBs
- Connectors
- Wiring harnesses
- Thermal components
- Carbon fiber composites
- Aluminum alloys
- Titanium alloys
- Engineering polymers
- Battery systems
- Power management modules
- Charging modules
Among these, dexterous hand components, joint modules, sensors, and AI control electronics are especially important.
They determine whether humanoid robots can move from “interesting machines” to “useful workers.”
Procurement Checklist for Humanoid Robot Components
For procurement and engineering teams, supplier selection should include both commercial and technical evaluation.
Technical Evaluation
- Does the component meet required torque, precision, load, and response speed?
- Is the product tested under repetitive motion conditions?
- Can the supplier provide reliability data?
- Is the component compatible with the robot’s mechanical and electrical architecture?
- Can the product handle heat, vibration, bending, and long operating cycles?
Supply Chain Evaluation
- Can the supplier support pilot production and future volume growth?
- Are lead times stable?
- Is there batch-to-batch consistency?
- Can the supplier provide traceability?
- Does the supplier support customization?
- Is there enough engineering communication capability?
Commercial Evaluation
- Is pricing suitable for future scaling?
- Are tooling and customization costs clear?
- Are payment terms reasonable?
- Can the supplier support export documentation?
- Is there a backup supply option?
A humanoid robot supply chain cannot rely on PowerPoint confidence alone.
It needs data, samples, testing, and boring but useful supplier management.
Boring wins when production starts.
Why China Matters in the Humanoid Robot Supply Chain
China has strong advantages in electronics manufacturing, mechanical processing, motor supply chains, sensors, PCBs, connectors, batteries, and consumer electronics-style mass production.
This creates a strong foundation for humanoid robot component supply.
Key advantages include:
- Dense supplier ecosystem
- Fast engineering iteration
- Strong manufacturing flexibility
- Competitive cost structure
- Mature electronics supply chain
- Rapid prototyping capability
- Growing domestic robot brands and component suppliers
For global OEMs and integrators, China is likely to remain an important sourcing base for humanoid robot components.
However, supplier selection must be careful.
The market will include both real technical suppliers and “PowerPoint champion” suppliers. The first builds robots. The second builds beautiful dreams.
Procurement teams need to verify capabilities through samples, testing, references, quality systems, and production records.
Future Outlook: From Robot Demonstration to Supply Chain Competition
The humanoid robot industry is still early, but the supply chain is already becoming broader and more specialized.
The next stage will not only be a competition between robot brands.
It will also be a competition between supply chains.
Companies that can secure reliable component channels early will be better positioned as humanoid robot production moves from pilot runs to higher-volume manufacturing.
The most important capabilities will include:
- Stable component supply
- Rapid engineering collaboration
- Cost reduction through scale
- Reliable quality control
- Flexible customization
- Strong supplier verification
- Global sourcing and delivery capability
In 2026, humanoid robots are not only an AI story.
They are also a manufacturing story, a supply chain story, and a component sourcing story.
FAQ
What is the humanoid robot supply chain?
The humanoid robot supply chain includes upstream component suppliers, midstream robot platform integrators, and downstream application markets. Key upstream components include sensors, actuators, motors, reducers, bearings, AI chips, communication modules, power systems, lightweight materials, wiring, connectors, and control electronics.
Why are dexterous hands important for humanoid robots?
Dexterous hands allow humanoid robots to grasp, manipulate, and interact with objects. They are essential for turning humanoid robots from walking machines into useful workers. Key components include tactile sensors, tendon-driven systems, joint torque sensors, embedded controllers, flexible PCBs, micro motors, and micro ball screws.
What stage are humanoid robots currently in?
Many advanced humanoid robots are moving from G2 general atomic skills toward G3 end-to-end operational skills. This means robots are progressing from basic reusable skills toward learning and executing more complete tasks.
What are the most important components in humanoid robots?
Important components include joint actuators, high-torque-density motors, precision reducers, torque sensors, tactile sensors, AI chips, MCUs, control boards, flexible PCBs, wiring harnesses, battery systems, power management modules, and lightweight structural materials.
What is the difference between general-purpose and specialized humanoid robots?
General-purpose humanoid robots focus on adaptability, scalability, low cost, and broad use cases. Specialized robots focus on reliability, precision, durability, and task-specific performance. Their supply chain requirements are different.
Why is supply chain quality important for humanoid robots?
Humanoid robots require many high-precision components working together. Poor quality in motors, sensors, reducers, PCBs, or power systems can affect safety, reliability, and production scalability. Supply chain quality directly determines whether robots can move from prototypes