🤖 El auge de las plataformas de hardware de robots humanoides
🔑 Conclusiones clave
• Los robots humanoides están pasando de demostraciones de conceptos a plataformas de hardware escalables, lo que acelera la demanda de motores, sensores, chips informáticos de inteligencia artificial, electrónica de potencia y manos diestras.
• La industria se define cada vez más por la eficiencia de la integración del sistema en lugar del rendimiento de los componentes aislados, y el control en tiempo real, la gestión térmica y la densidad de potencia se convierten en factores competitivos fundamentales.
• Las cadenas de suministro para robots humanoides se están formando rápidamente en torno a subsistemas de alto valor que incluyen actuadores, reductores de armónicos, sensores táctiles, controladores de IA integrados y tecnologías de interconexión flexibles.
📈 Por qué los robots humanoides están entrando en una nueva fase industrial
La industria de la robótica humanoide está avanzando más allá de los prototipos experimentales hacia la etapa inicial de comercialización. A diferencia de los ciclos robóticos anteriores centrados principalmente en brazos de automatización industrial o movilidad de almacenes, la generación actual de sistemas humanoides está diseñada en torno al movimiento, la percepción, la interacción y la manipulación diestra similares a los humanos.
Esta transición está creando un nuevo ecosistema de hardware multicapa que combina computación de inteligencia artificial, control de movimiento, mecánica de precisión, tecnologías de detección, administración de energía e integración electrónica de alta densidad.
Para los OEM y los proveedores de EMS, la oportunidad ya no se limita al ensamblaje final del robot. El valor real reside cada vez más en los subsistemas ascendentes y las tecnologías habilitadoras.
🧩 Comprensión de la arquitectura de hardware central de un robot humanoide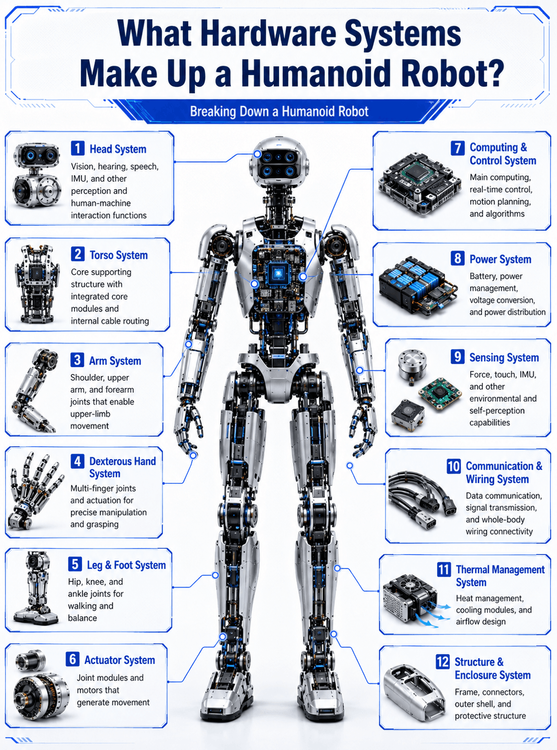
Un robot humanoide puede verse como una plataforma informática electromecánica distribuida. La mayoría de las arquitecturas actuales se pueden dividir en doce dominios de hardware principales.
💡 Cabeza y sistema de percepción
El sistema principal integra cámaras, micrófonos, IMU, módulos de detección de profundidad y hardware de interacción con IA. Esta capa funciona como la principal puerta de percepción del robot para la comprensión del entorno y la interacción hombre-máquina.
Los módulos de visión combinan cada vez más cámaras RGB, imágenes infrarrojas, sensores ToF y chips de aceleración de IA de borde para respaldar la conciencia espacial en tiempo real.
🦾 Sistema de brazos y manos diestros
El sistema de brazo proporciona movimiento multieje para alcanzar, levantar y manipular coordinadamente. Al final de la cadena cinemática se encuentra la diestra mano, que se está convirtiendo en uno de los subsistemas de mayor valor en la robótica humanoide.
Las manos diestras modernas integran:
• Estructuras articuladas con múltiples dedos
• Sensor de par integrado
• Conjuntos táctiles con la punta de los dedos
• Actuación impulsada por tendón o de accionamiento directo
• Interconexiones de PCB flexibles
• Algoritmos de control de agarre en tiempo real
La industria está pasando de las demostraciones de “puede moverse” a la usabilidad práctica, la durabilidad y la repetibilidad.
Objetivo típico de las manos diestras de próxima generación:
• 12 a 22 grados de libertad
• Precisión de posicionamiento repetido inferior a 0,02 mm
• Latencia de respuesta inferior a 10 ms
• Capacidad de carga útil entre 3 y 5 kg
• Fiabilidad operativa de ciclo largo
⚙️ Actuador y sistema de movimiento
Los actuadores funcionan como el sistema muscular de los robots humanoides. Una arquitectura de movimiento completa normalmente incluye:
• Motores de torsión sin marco
• Reductores de armónicos
• Sistemas de engranajes planetarios
• Husillos de bolas
• Servocontroladores
• Sensores de par
Los módulos de unión deben optimizar simultáneamente la densidad de potencia, la eficiencia térmica, el control del juego y la respuesta dinámica.
Las articulaciones del hombro, la cadera, la rodilla, el tobillo, la muñeca y el cuello requieren diferentes características de torsión y movimiento, lo que lleva a diseños de motor y transmisión altamente personalizados.
🔋 Sistema de gestión de energía y energía
Los sistemas de baterías representan un importante cuello de botella en ingeniería para los robots humanoides debido a las limitaciones de tiempo de ejecución y restricciones térmicas.
Las plataformas modernas dependen cada vez más de:
• Paquetes de baterías de litio de alta densidad
• Circuitos integrados de monitoreo BMS
• Arquitecturas PMIC multirraíl
• Sistemas distribuidos de conversión de energía.
• Módulos de equilibrio térmico
La eficiencia de la distribución de energía afecta directamente la estabilidad al caminar, la respuesta del actuador y el rendimiento de la computación de la IA.
🧠 La arquitectura del chip detrás de los robots humanoides
El sistema de chips de un robot humanoide es significativamente más complejo que el de los equipos de automatización industrial tradicionales.
En lugar de un único procesador central, los robots humanoides utilizan una arquitectura informática heterogénea distribuida.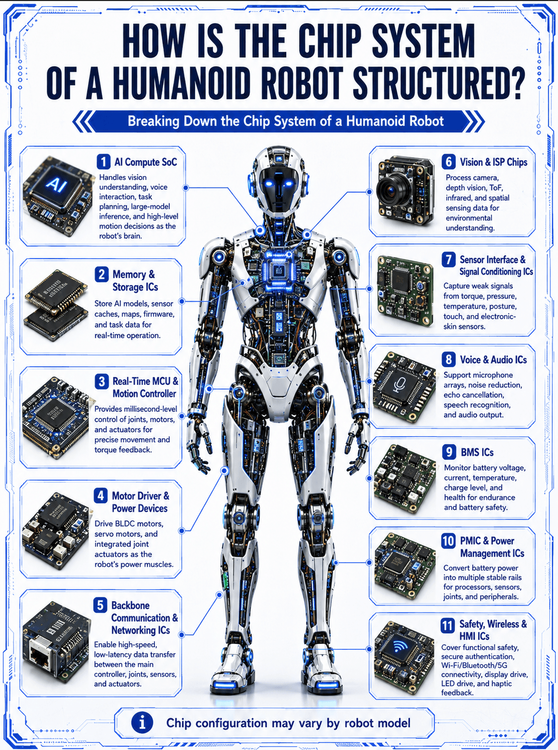
💻 Capa SoC de computación AI
Los chips de computación de IA actúan como el "cerebro" del robot y manejan:
• Comprensión de la visión
• Interacción del habla
• Planificación de movimiento
• Inferencia de modelo grande
• Toma de decisiones multimodal
Esta capa depende cada vez más de aceleradores de IA de alto rendimiento capaces de realizar inferencias de borde con baja latencia y presupuestos de energía limitados.
📡 MCU en tiempo real y capa de control de movimiento
Mientras que los procesadores de IA generan decisiones de alto nivel, las MCU en tiempo real ejecutan un control determinista de baja latencia para motores y actuadores.
Estos controladores gestionan:
• Sincronización conjunta
• Retroalimentación de par
• Bucles de posición
• Interpolación de movimiento
• Monitoreo de seguridad
La coherencia de la respuesta a nivel de milisegundos es esencial para una locomoción y manipulación estables.
📷 Circuitos integrados de interfaz de sensores y visión
Los robots humanoides requieren capacidades masivas de fusión de sensores.
Los circuitos integrados de interfaz de sensor agregan y procesan señales de:
• Cámaras
• IMU
• Sensores táctiles
• Sensores de par
• Sensores de presión
• Módulos de temperatura
• Sistemas de detección de proximidad
La integridad de la señal y el diseño analógico de bajo ruido se vuelven cada vez más importantes a medida que aumenta la densidad del sensor.
🌐 Columna vertebral de comunicación y networking
Un robot humanoide se comporta como un sistema en red distribuido.
Las arquitecturas de comunicación interna suelen incluir:
• Ethernet industrial
• CAN/CAN-FD
• EtherCAT
• Enlaces de serializador de alta velocidad
• Sincronización de bus en tiempo real
La comunicación de baja latencia se vuelve crítica a medida que los robots escalan hacia docenas de actuadores y nodos sensores coordinados.
🖐️ Las manos diestras se están convirtiendo en el próximo campo de batalla de gran valor
Entre todos los subsistemas de robots humanoides, las manos diestras se están convirtiendo en una de las categorías de mayor importancia estratégica.
La razón es sencilla: la locomoción demuestra movilidad, pero la manipulación diestra determina la utilidad económica.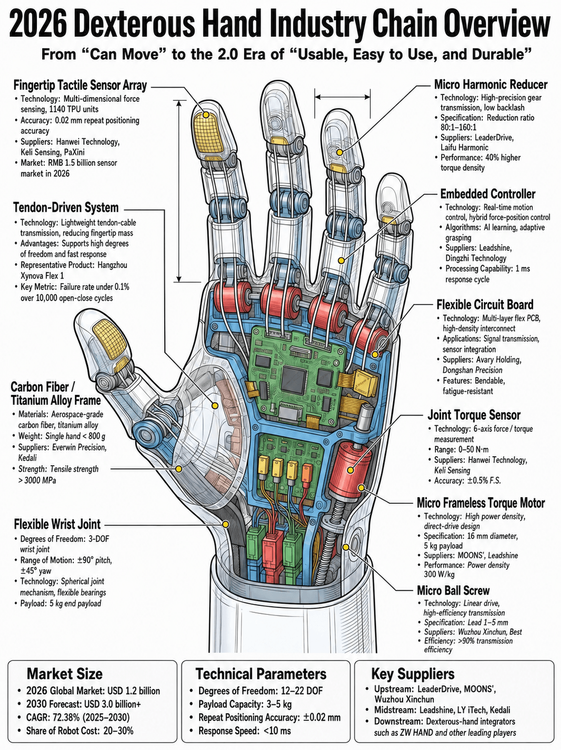
Un robot humanoide comercialmente útil debe eventualmente realizar:
• Manejo de herramientas
• Clasificación de materiales
• Montaje fino
• Colaboración hombre-máquina
• Agarre adaptativo
• Interacción delicada con objetos
Este requisito está impulsando una rápida innovación en:
• Conjuntos de sensores táctiles
• Control de fuerza integrado
• Electrónica flexible
• Sistemas de transmisión de tendones
• Reductores de armónicos compactos
• Motores en miniatura
La cadena de suministro está evolucionando gradualmente desde proveedores de componentes aislados hacia ecosistemas de módulos conjuntos verticalmente integrados.
🏭 Estructura emergente de la cadena de suministro en robótica humanoide
La cadena de suministro de robótica humanoide generalmente se puede dividir en tres capas.
🔹 Componentes principales ascendentes
Este segmento incluye:
• chips de IA
• Motores de precisión
• Reductores de armónicos
• Rodamientos
• Sensores de par
• PCB flexibles
• Conectores
• Sistemas de baterías
Estos componentes suelen representar las barreras técnicas más altas y el mayor poder de fijación de precios.
🔹 Integradores de módulos Midstream
Esta capa se centra en:
• Módulos conjuntos
• Conjuntos de manos diestros
• Sistemas de control de movimiento
• Plataformas de controlador integradas
• Módulos de fusión de sensores
La capacidad de integración define cada vez más la diferenciación.
🔹 OEM de robots posteriores
Los fabricantes de robots integran la arquitectura completa del sistema y la pila de software para escenarios de implementación específicos que incluyen logística, fabricación, inspección, venta minorista, atención médica y robótica de servicios.
🚀 El próximo enfoque competitivo: confiabilidad y capacidad de fabricación
Es poco probable que la próxima etapa de la competencia en robótica humanoide esté determinada únicamente por la capacidad de la IA.
En cambio, la escalabilidad industrial dependerá de:
• Fiabilidad en funcionamiento continuo
• Consistencia de fabricación
• Estabilidad térmica
• Madurez de la cadena de suministro
• Simplicidad de mantenimiento
• Reducción de costos a través de la modularización
Esto es especialmente cierto para manos diestras, sistemas de actuadores y arquitecturas de control integradas, donde la durabilidad de ciclos largos sigue siendo un desafío técnico importante.
📊 Conclusión
Los robots humanoides están evolucionando rápidamente hasta convertirse en uno de los productos electromecánicos más complejos de la fabricación moderna.
A medida que la industria madura, la concentración de valor se está desplazando hacia subsistemas de alto rendimiento, incluidas plataformas informáticas de inteligencia artificial, electrónica de control de movimiento, manos diestras, actuadores de precisión y arquitecturas de detección.
Para los OEM, los proveedores de EMS y los proveedores de componentes, comprender la pila de hardware completa, en lugar de los componentes aislados, será esencial para participar en la siguiente fase de la industrialización de la robótica humanoide.