🤖 The Rise of Humanoid Robot Hardware Platforms
🔑 Key Takeaways
• Humanoid robots are transitioning from concept demonstrations to scalable hardware platforms, accelerating demand for motors, sensors, AI compute chips, power electronics, and dexterous hands.
• The industry is increasingly defined by system integration efficiency rather than isolated component performance, with real-time control, thermal management, and power density becoming core competitive factors.
• Supply chains for humanoid robots are rapidly forming around high-value subsystems including actuators, harmonic reducers, tactile sensing, embedded AI controllers, and flexible interconnect technologies.
📈 Why Humanoid Robots Are Entering a New Industrial Phase
The humanoid robotics industry is moving beyond experimental prototypes into the early stage of commercialization. Unlike previous robotics cycles focused mainly on industrial automation arms or warehouse mobility, the current generation of humanoid systems is designed around human-like motion, perception, interaction, and dexterous manipulation.
This transition is creating a new multi-layer hardware ecosystem that combines AI computing, motion control, precision mechanics, sensing technologies, power management, and high-density electronic integration.
For OEMs and EMS providers, the opportunity is no longer limited to final robot assembly. The real value increasingly lies within upstream subsystems and enabling technologies.
🧩 Understanding the Core Hardware Architecture of a Humanoid Robot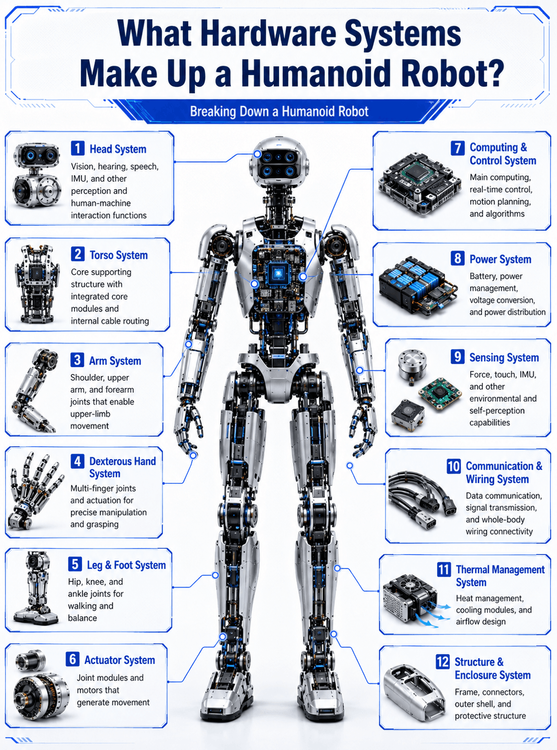
A humanoid robot can be viewed as a distributed electromechanical computing platform. Most current architectures can be divided into twelve major hardware domains.
💡 Head and Perception System
The head system integrates cameras, microphones, IMUs, depth sensing modules, and AI interaction hardware. This layer functions as the robot’s primary perception gateway for environmental understanding and human-machine interaction.
Vision modules increasingly combine RGB cameras, infrared imaging, ToF sensors, and edge AI acceleration chips to support real-time spatial awareness.
🦾 Arm and Dexterous Hand System
The arm system provides multi-axis movement for reaching, lifting, and coordinated manipulation. At the end of the kinematic chain sits the dexterous hand, which is becoming one of the highest-value subsystems in humanoid robotics.
Modern dexterous hands integrate:
• Multi-finger articulated structures
• Embedded torque sensing
• Fingertip tactile arrays
• Tendon-driven or direct-drive actuation
• Flexible PCB interconnects
• Real-time grasp control algorithms
The industry is shifting from “can move” demonstrations toward practical usability, durability, and repeatability.
Typical next-generation dexterous hands target:
• 12–22 degrees of freedom
• Sub-0.02 mm repeat positioning accuracy
• Less than 10 ms response latency
• Payload capacity between 3–5 kg
• Long-cycle operational reliability
⚙️ Actuator and Motion System
Actuators function as the muscle system of humanoid robots. A complete motion architecture typically includes:
• Frameless torque motors
• Harmonic reducers
• Planetary gear systems
• Ball screws
• Servo drivers
• Torque sensors
Joint modules must simultaneously optimize power density, thermal efficiency, backlash control, and dynamic response.
The shoulder, hip, knee, ankle, wrist, and neck joints all require different torque and motion characteristics, leading to highly customized motor and transmission designs.
🔋 Power and Energy Management System
Battery systems represent a major engineering bottleneck for humanoid robots due to runtime limitations and thermal constraints.
Modern platforms increasingly rely on:
• High-density lithium battery packs
• BMS monitoring ICs
• Multi-rail PMIC architectures
• Distributed power conversion systems
• Thermal balancing modules
Power distribution efficiency directly impacts walking stability, actuator response, and AI compute performance.
🧠 The Chip Architecture Behind Humanoid Robots
The chip system of a humanoid robot is significantly more complex than traditional industrial automation equipment.
Instead of a single central processor, humanoid robots use a distributed heterogeneous computing architecture.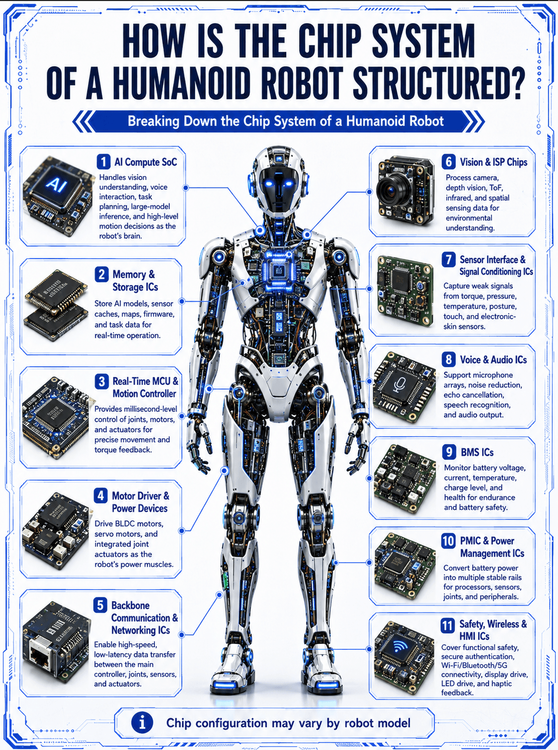
💻 AI Compute SoC Layer
AI compute chips act as the “brain” of the robot, handling:
• Vision understanding
• Speech interaction
• Motion planning
• Large-model inference
• Multi-modal decision making
This layer increasingly depends on high-performance AI accelerators capable of edge inference with low latency and constrained power budgets.
📡 Real-Time MCU and Motion Control Layer
While AI processors generate high-level decisions, real-time MCUs execute deterministic low-latency control for motors and actuators.
These controllers manage:
• Joint synchronization
• Torque feedback
• Position loops
• Motion interpolation
• Safety monitoring
Millisecond-level response consistency is essential for stable locomotion and manipulation.
📷 Vision and Sensor Interface ICs
Humanoid robots require massive sensor fusion capabilities.
Sensor interface ICs aggregate and process signals from:
• Cameras
• IMUs
• Tactile sensors
• Torque sensors
• Pressure sensors
• Temperature modules
• Proximity sensing systems
Signal integrity and low-noise analog design become increasingly important as sensor density increases.
🌐 Communication and Networking Backbone
A humanoid robot behaves like a distributed networked system.
Internal communication architectures often include:
• Industrial Ethernet
• CAN/CAN-FD
• EtherCAT
• High-speed serializer links
• Real-time bus synchronization
Low-latency communication becomes critical as robots scale toward dozens of coordinated actuators and sensing nodes.
🖐️ Dexterous Hands Are Becoming the Next High-Value Battlefield
Among all humanoid robot subsystems, dexterous hands are emerging as one of the most strategically important categories.
The reason is straightforward: locomotion demonstrates mobility, but dexterous manipulation determines economic utility.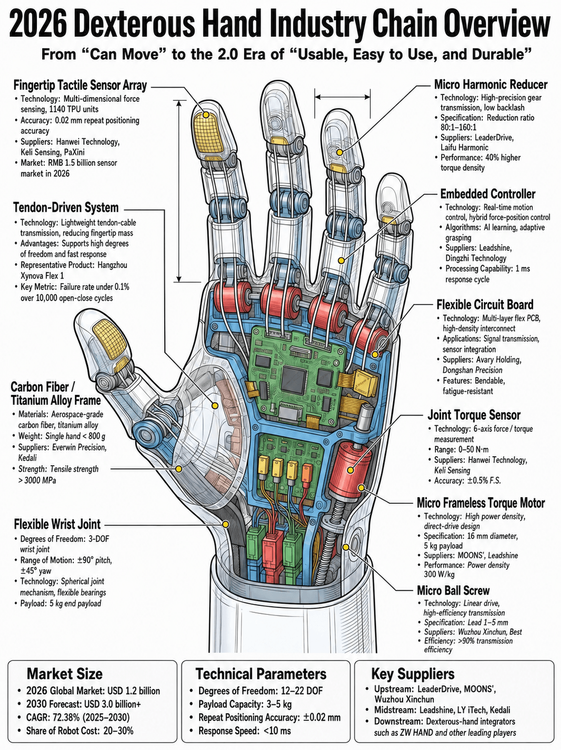
A commercially useful humanoid robot must eventually perform:
• Tool handling
• Material sorting
• Fine assembly
• Human-machine collaboration
• Adaptive grasping
• Delicate object interaction
This requirement is driving rapid innovation across:
• Tactile sensing arrays
• Embedded force control
• Flexible electronics
• Tendon transmission systems
• Compact harmonic reducers
• Miniature motors
The supply chain is gradually evolving from isolated component vendors toward vertically integrated joint-module ecosystems.
🏭 Emerging Supply Chain Structure in Humanoid Robotics
The humanoid robotics supply chain can generally be divided into three layers.
🔹 Upstream Core Components
This segment includes:
• AI chips
• Precision motors
• Harmonic reducers
• Bearings
• Torque sensors
• Flexible PCBs
• Connectors
• Battery systems
These components usually represent the highest technical barriers and strongest pricing power.
🔹 Midstream Module Integrators
This layer focuses on:
• Joint modules
• Dexterous hand assemblies
• Motion control systems
• Embedded controller platforms
• Sensor fusion modules
Integration capability increasingly defines differentiation.
🔹 Downstream Robot OEMs
Robot manufacturers integrate the complete system architecture and software stack for specific deployment scenarios including logistics, manufacturing, inspection, retail, healthcare, and service robotics.
🚀 The Next Competitive Focus: Reliability and Manufacturability
The next stage of humanoid robotics competition is unlikely to be determined solely by AI capability.
Instead, industrial scalability will depend on:
• Reliability under continuous operation
• Manufacturing consistency
• Thermal stability
• Supply chain maturity
• Maintenance simplicity
• Cost reduction through modularization
This is especially true for dexterous hands, actuator systems, and embedded control architectures, where long-cycle durability remains a major technical challenge.
📊 Conclusion
Humanoid robots are rapidly evolving into one of the most complex electromechanical products in modern manufacturing.
As the industry matures, value concentration is shifting toward high-performance subsystems including AI compute platforms, motion control electronics, dexterous hands, precision actuators, and sensing architectures.
For OEMs, EMS providers, and component suppliers, understanding the complete hardware stack — rather than isolated components — will become essential for participating in the next phase of humanoid robotics industrialization.