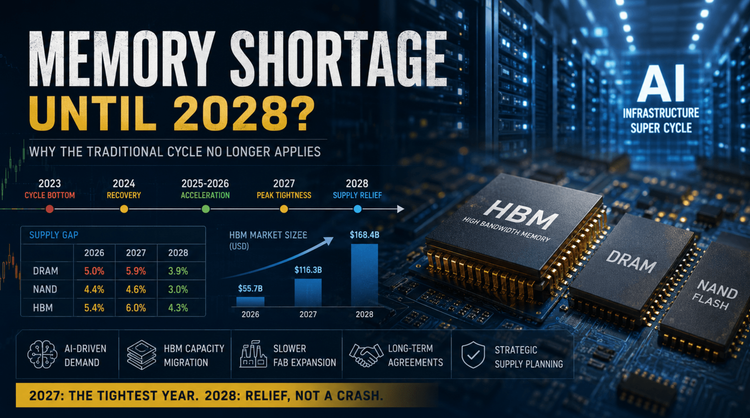
Los robots humanoides están entrando en un período de transición crítico.
Después de años de demostraciones en laboratorio, la industria ahora avanza hacia la producción piloto, pruebas en fábrica y una implementación comercial temprana. La cuestión clave ya no es simplemente si los robots humanoides pueden caminar, agarrar, percibir e interactuar.
La verdadera pregunta es:
¿Puede la cadena de suministro respaldar una producción a escala confiable, repetible y rentable?
En 2026, se espera que la industria de los robots humanoides esté determinada por tres fuerzas principales:
- Rápido progreso en la IA incorporada
- Componentes electromecánicos de mayor rendimiento.
- Ampliación de la fabricación por parte de empresas líderes en robótica

Para los proveedores de componentes, OEM, integradores de sistemas y equipos de adquisiciones, los robots humanoides están creando un nuevo panorama de abastecimiento en hardware ascendente, integración intermedia y aplicaciones descendentes.
En términos simples, la industria está pasando de“puede moverse”a"Utilizable, fácil de usar y duradero".
Eso suena como un pequeño cambio. No lo es.
Es la diferencia entre un robot que luce impresionante en el escenario y un robot que puede trabajar todos los días en una fábrica, almacén, hospital, hotel o casa.
Conclusiones clave
- Los robots humanoides están evolucionando desde demostraciones de prototipos hacia una producción temprana escalable.
- Manos diestras, módulos de unión, sensores, actuadores, reductores, chips de IA, PCB flexibles y materiales livianos se están convirtiendo en áreas de valor clave.
- La etapa actual de la industria se encuentra aproximadamente entreG2 habilidades atómicas generalesyHabilidades operativas de extremo a extremo de G3.
- Los robots humanoides de uso general y los robots especializados requieren diferentes estrategias de cadena de suministro.
- Los equipos de adquisiciones deben evaluar no sólo el precio, sino también la confiabilidad, la trazabilidad, la estabilidad del tiempo de entrega, el soporte de ingeniería y la compatibilidad del sistema.
- Puede que los ganadores no sean sólo las marcas de robots. Muchos campeones ocultos procederán de los proveedores de componentes.
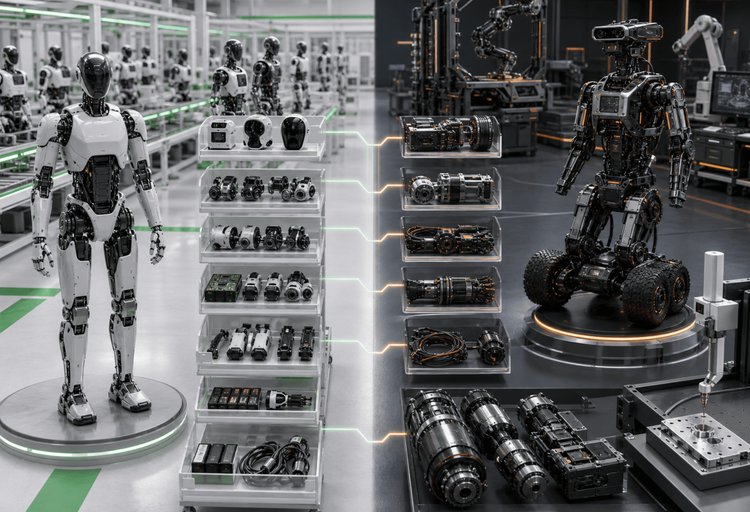
La cadena de valor de los robots humanoides de 2026
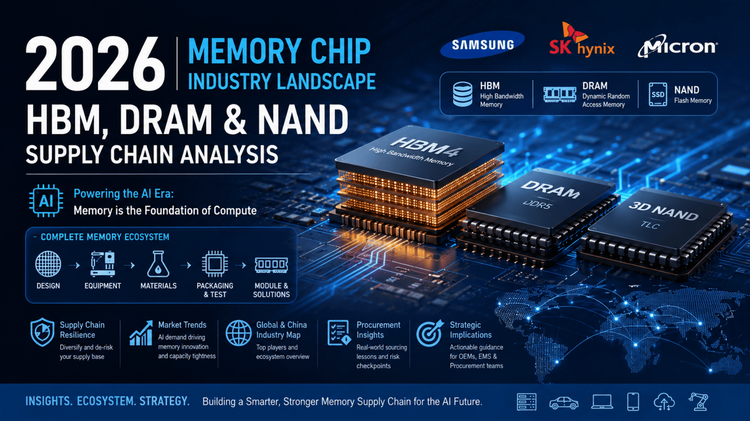
La cadena de suministro de robots humanoides se puede dividir en tres capas:
- Proveedores upstream
- Empresas de integración midstream
- Mercados de aplicaciones posteriores
Cada capa desempeña un papel diferente en el movimiento de robots humanoides desde prototipos de ingeniería hasta productos comerciales.
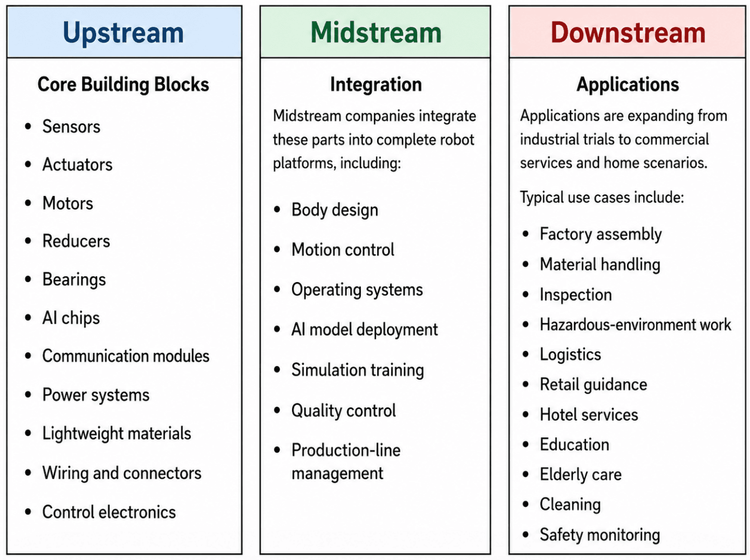
Proveedores upstream: componentes básicos
Los proveedores upstream proporcionan los componentes básicos de los robots humanoides.
Estos incluyen:
- Sensores
- Actuadores
- motores
- Reductores
- Aspectos
- chips de IA
- Módulos de comunicación
- Sistemas de energía
- Materiales ligeros
- Cableado y conectores
- Electrónica de control
Los robots humanoides no son sólo “robots con forma humana”. Son sistemas electromecánicos densos que requieren coordinación de percepción, control de movimiento, gestión de energía, informática, estructura y software.
Un pequeño fallo en un componente puede afectar a todo el robot.
Por ejemplo:
- Un sensor de torsión deficiente reduce la precisión de agarre.
- Un reductor de baja calidad aumenta el juego y la inestabilidad del movimiento.
- Una PCB flexible poco confiable puede fallar después de doblarse repetidamente.
- Un diseño térmico débil puede reducir la vida útil del actuador.
- Un sistema eléctrico inestable puede limitar el tiempo de trabajo.
Por este motivo, la calidad de los componentes upstream se convertirá en uno de los factores competitivos más importantes en la robótica humanoide.
Integración intermedia: convertir componentes en plataformas robóticas
Las empresas midstream integran componentes upstream en plataformas robóticas completas.
Esta capa incluye:
- Diseño de carrocería
- control de movimiento
- Sistemas operativos
- Implementación del modelo de IA
- Entrenamiento de simulación
- Control de calidad
- Gestión de la línea de producción.
La integración intermedia es donde el robot se convierte en algo más que una colección de piezas.
Un robot humanoide necesita coordinar:
- Percepción
- Planificación
- control de equilibrio
- movimiento del brazo
- control de dedos
- Interacción hombre-máquina
- Consumo de energía
- Comentarios en tiempo real
Es por eso que las empresas midstream necesitan capacidades sólidas tanto en ingeniería de hardware como en software de inteligencia artificial.
El desafío no es sólo hacer que un robot se mueva.
El desafío más difícil es hacer que se mueva.sin problemas, de forma segura, repetida y económica.
Aplicaciones posteriores: desde pruebas en fábrica hasta uso en el mundo real
Las aplicaciones posteriores se están expandiendo desde pruebas industriales hasta servicios comerciales y escenarios domésticos.
Los casos de uso típicos incluyen:
- Montaje en fábrica
- Manipulación de materiales
- Inspección
- Trabajo en ambientes peligrosos
- Logística
- Orientación minorista
- Servicios hoteleros
- Educación
- cuidado de ancianos
- Limpieza
- Monitoreo de seguridad
En la etapa inicial, es probable que los entornos industriales y comerciales sean más realistas que los escenarios domésticos.
¿Por qué?
Porque las fábricas y los almacenes suelen tener tareas más claras, entornos más estructurados y una mayor disposición a pagar. Los escenarios domésticos son atractivos, pero requieren estándares mucho más altos en materia de seguridad, costo, control de ruido, duración de la batería, experiencia del usuario e interacción emocional.
El mercado de robots domésticos es enorme, pero también es un examen más difícil. Ningún profesor da crédito parcial en casa.
Hardware central: dónde se decide el rendimiento del robot
Un robot humanoide es un sistema de alta densidad de motores, reductores, sensores, controladores, chips, piezas estructurales, cables y software.
Entre todos los módulos de hardware, varias áreas merecen especial atención.
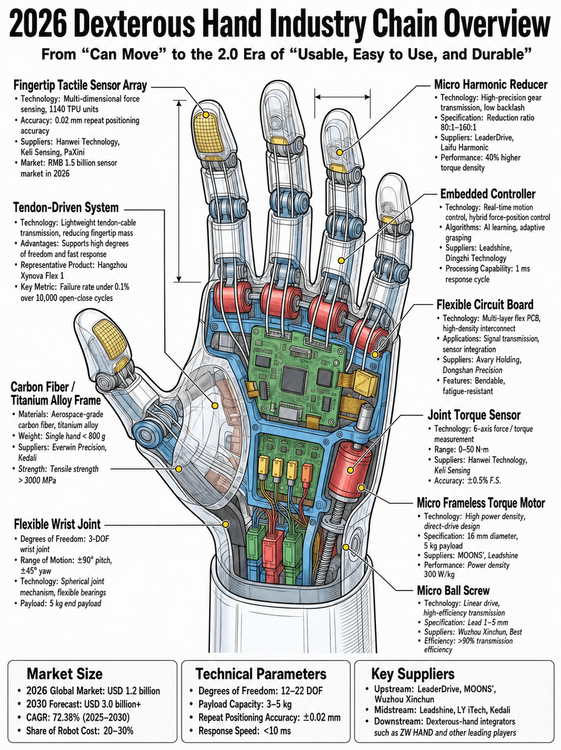
Manos diestras: el próximo campo de batalla clave
La mano diestra es uno de los subsistemas más importantes de los robots humanoides.
Caminar hace que un robot parezca un humano.
Pero agarrar, manipular y utilizar herramientas lo hace útil.
Una mano robótica diestra puede incluir:
- Conjuntos de sensores táctiles en la punta de los dedos
- Sistemas impulsados por tendones
- Microactuadores
- Sensores de par de articulación
- Placas de circuitos flexibles
- Controladores integrados
- Micromotores
- Husillos de bolas micro
- Marcos estructurales ligeros
- Articulaciones de muñeca flexibles
Se espera que las manos diestras del futuro respalden:
- Más grados de libertad
- Feedback de fuerza más preciso
- Velocidad de respuesta más rápida
- Mayor durabilidad
- Mejor adaptabilidad a las tareas
- Menor peso
- Menor costo de fabricación
La dirección es clara: las manos robóticas deben ser no sólo más capaces, sino también más fabricables.
Componentes clave para manos diestras
Matriz de sensores táctiles en la punta de los dedos
Los sensores táctiles en la punta de los dedos ayudan al robot a detectar cambios de fuerza, presión, textura y contacto.
Son críticos para:
- Agarrar objetos frágiles
- Ajuste de la fuerza de agarre
- Detectar deslizamiento
- Realizar una manipulación precisa
- Mejorar la seguridad de la interacción entre humanos y robots
Sin retroalimentación táctil, una mano de robot puede sostener un huevo como una piedra o una herramienta como un pescado mojado.
Sistema impulsado por tendones
Los sistemas impulsados por tendones utilizan estructuras de transmisión similares a cables para reducir la masa de las yemas de los dedos y mejorar la flexibilidad.
Las ventajas incluyen:
- Diseño ligero
- Mejor flexibilidad de los dedos
- Mayores grados de libertad
- Respuesta rápida
- Movimiento más parecido al humano
Este diseño es especialmente valioso cuando la mano necesita realizar tareas delicadas manteniendo la masa del actuador alejada de las yemas de los dedos.
Reductor microarmónico
Los reductores de microarmónicos proporcionan una transmisión de alta precisión en espacios compactos.
Los requisitos clave incluyen:
- Baja reacción
- Alta densidad de par
- tamaño pequeño
- Alta confiabilidad
- Larga vida útil
Son importantes para las articulaciones de los dedos, las muñecas y los sistemas de actuación compactos.
Controlador integrado
El controlador integrado es el "cerebro" local de la mano.
Se encarga de:
- Control de movimiento en tiempo real
- Control híbrido de fuerza-posición
- Procesamiento de datos de sensores
- Agarre adaptativo
- Comunicación con el cuerpo del robot.
Para manos diestras, el tiempo de respuesta es importante. Un retraso de sólo unos pocos milisegundos puede afectar la estabilidad de agarre.
Placa de circuito flexible
Las placas de circuitos flexibles se utilizan para la transmisión de señales y la integración de sensores en estructuras móviles compactas.
Necesitan ser:
- Flexible
- Resistente a la fatiga
- Delgado
- Confiable
- Adecuado para interconexión de alta densidad
En manos robóticas, los PCB flexibles no son decoraciones opcionales. Son equipos de supervivencia.
Sensor de par de articulación
Los sensores de torsión de las articulaciones miden la fuerza y la torsión en las articulaciones del robot.
Ayudan a mejorar:
- control de fuerza
- Seguridad
- Precisión de agarre
- Control de cumplimiento
- Retroalimentación de movimiento
Para los robots humanoides que trabajan cerca de humanos, la detección de fuerza no se trata sólo de rendimiento. También se trata de seguridad.
Micromotor de torsión sin marco
Los micromotores de torsión sin marco proporcionan una salida de movimiento compacta y de alta densidad de potencia.
Los requisitos importantes incluyen:
- Alta densidad de potencia
- Diseño compacto
- Baja generación de calor
- Capacidad de accionamiento directo
- Operación estable a largo plazo
Estos motores son componentes clave en módulos articulares y manos robóticas.
Husillo de bolas micro
Los microhusillos de bolas convierten el movimiento giratorio en un movimiento lineal preciso.
Pueden apoyar:
- Transmisión de alta eficiencia
- Accionamiento lineal compacto
- Alta precisión
- Fuerte capacidad de carga
- Movimiento repetitivo duradero
Son especialmente útiles en pequeños sistemas de actuación robótica donde el espacio es limitado pero se requiere precisión.
Marco de fibra de carbono y aleación de titanio.
Los materiales estructurales livianos son esenciales para los robots humanoides.
Los materiales comunes incluyen:
- Compuestos de fibra de carbono
- Aleaciones de aluminio
- Aleaciones de titanio
- Plásticos de ingeniería
- Polímeros de alto rendimiento
El objetivo es reducir el peso manteniendo la fuerza y la seguridad.
Un robot más liviano es más fácil de mover, consume menos energía y coloca menos carga en motores, reductores, rodamientos y baterías.
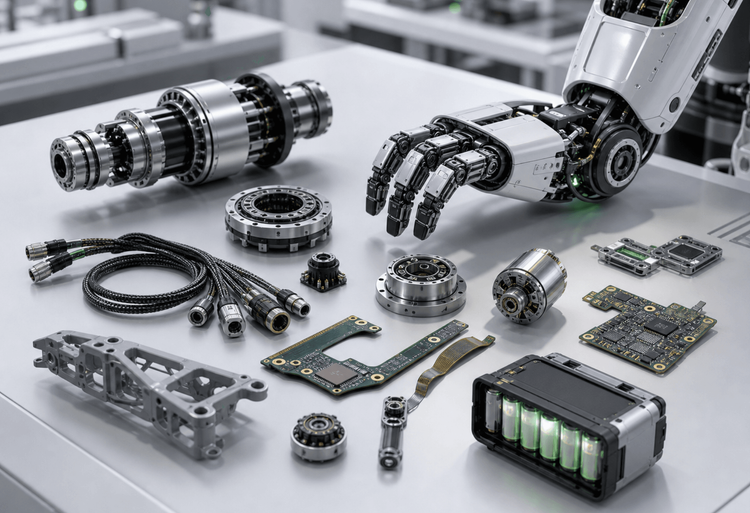
Módulos conjuntos: el centro de costos y rendimiento
Los módulos conjuntos son otra parte fundamental de los robots humanoides.
Un módulo conjunto típico puede incluir:
- Motor
- reductor
- Cojinete
- Codificador
- Sensor de par
- Controlador
- Sistema de gestión térmica
Los indicadores clave de desempeño incluyen:
- Alta densidad de par
- Baja reacción
- Bajo nivel de ruido
- Alta precisión
- Larga vida útil
- Buena disipación de calor
- Estructura compacta
Los módulos articulares afectan directamente la estabilidad al caminar, el movimiento del brazo, la capacidad de carga, el control del equilibrio y la precisión de la manipulación.
En los robots humanoides, la articulación no es sólo una pieza mecánica.
Es donde se encuentran la ingeniería mecánica, la electrónica, los algoritmos de control y la calidad de fabricación.
Sistemas de percepción: de ver a comprender
Los sistemas de percepción permiten a los robots humanoides comprender su entorno.
Pueden incluir:
- Cámaras
- Sensores táctiles
- Sensores de fuerza
- IMU
- Cámaras de profundidad
- LiDAR
- Algoritmos de visión
Muchas hojas de ruta de la industria están avanzando hacia sistemas de percepción que priorizan la visión respaldados por redes neuronales de extremo a extremo y sistemas de decisión en tiempo real.
Sin embargo, la visión por sí sola no es suficiente.
Un robot humanoide también necesita retroalimentación de fuerza, retroalimentación táctil, detección de equilibrio y conciencia ambiental. Cuanto más fuerte sea el sistema de percepción, mejor podrá adaptarse el robot a tareas complejas.

IA incorporada: la verdadera mejora
El próximo gran salto es la inteligencia encarnada.
A diferencia de los robots industriales tradicionales, los robots humanoides deben interactuar con entornos físicos abiertos. Necesitan percibir, planificar, aprender y ejecutar tareas a través de un cuerpo físico.
La pila de tecnología puede entenderse como dos capas conectadas.
Capa de alto nivel
Esta capa maneja:
- Planificación de tareas
- Descomposición de tareas
- Percepción
- Razonamiento
- Toma de decisiones
Capa de bajo nivel
Esta capa maneja:
- control de movimiento
- Ejecución de movimientos
- Comentario
- Corrección
- control de fuerza
Los grandes modelos multimodales se están convirtiendo en la capa de razonamiento de los robots humanoides.
Los modelos específicos de robots, el aprendizaje por refuerzo, el aprendizaje por imitación y el entrenamiento con simulación ayudan a traducir las decisiones en acciones físicas.
En otras palabras:
Los modelos grandes ayudan a los robots a entender qué hacer.
Los sistemas de control de movimiento ayudan a los robots a hacerlo.
Uno es el cerebro. El otro es el cuerpo.
Un robot necesita ambos.
El camino de evolución G1-G5 de los robots de IA de uso general
El camino del desarrollo de los robots humanoides se puede describir en cinco etapas.
| Escenario | Nombre | Capacidad | Descripción típica |
|---|---|---|---|
| G1 | Automatización básica | Tareas programadas fijas | Automatización estilo robot industrial tradicional |
| G2 | Habilidades atómicas generales | Habilidades básicas reutilizables | Recoger, colocar, movimiento simple, generalización de tareas básicas. |
| G3 | Habilidades operativas de un extremo a otro | Aprendizaje completo de tareas | Los robots aprenden tareas relativamente completas a partir de datos |
| G4 | Modelo grande de operación de uso general | Planificación de varios pasos | Los robots comprenden instrucciones complejas y ejecutan tareas de varios pasos |
| G5 | AGI incorporado | Amplia adaptación | Los robots se adaptan a muchos entornos y tareas con flexibilidad a nivel humano |
Los robots humanoides avanzados actuales generalmente todavía se encuentran en la transición de G2 a G3.
Eso significa que la industria aún no se encuentra en la etapa de “un robot lo hace todo”.
Pero está pasando de demostraciones de una sola función a utilidad a nivel de tarea.
Esta transición es extremadamente importante para la cadena de suministro porque cada etapa crea requisitos de componentes diferentes.
Desarrollo histórico: de los primeros conceptos a la industrialización
El desarrollo de robots humanoides no se produjo de la noche a la mañana.
Se puede dividir a grandes rasgos en tres etapas.
Décadas de 1950 a 1990: exploración y teoría tempranas
Esta etapa se centró en conceptos básicos de robótica y primeros prototipos humanoides.
Instrucciones importantes incluidas:
- Morfología del robot
- Teoría básica de la automatización.
- Investigación temprana sobre la marcha bípeda
- Experimentos de estructura mecánica.
Durante este período, los robots humanoides se dedicaban más a probar conceptos que a resolver problemas comerciales.
2000-2022: Acumulación de tecnología e integración multidisciplinaria
En este período se produjeron importantes avances en:
- control dinámico
- Tecnología de equilibrio
- Aprendizaje por refuerzo
- Fusión de sensores
- Planificación de movimiento
- Simulación
- Actuadores de alto rendimiento
Robots como los cuadrúpedos avanzados y las plataformas de investigación humanoides demostraron que los robots podían moverse de manera más dinámica y manejar terrenos más complejos.
Esta etapa sentó las bases técnicas para el auge de los robots humanoides actuales.
2022-presente: gran aceleración impulsada por modelos
Después de 2022, los grandes modelos de IA empezaron a cambiar la lógica del desarrollo de robots.
Las tendencias clave incluyen:
- Modelos de IA multimodales
- Modelos de cimentación de robots
- Entrenamiento de simulación a realidad
- Modelos visión-lenguaje-acción
- Iteración más rápida de plataformas robóticas de uso general
Esta etapa está empujando a los robots humanoides de la “competencia de desempeño mecánico” a la “competencia de inteligencia y aplicaciones”.
Robots de uso general versus robots especializados
Diferentes estrategias de robots crean diferentes requisitos en la cadena de suministro.
El mercado está formando aproximadamente dos direcciones principales:
- Robots humanoides de uso general
- Robots especializados
Robots humanoides de uso general
Los robots humanoides de uso general priorizan:
- Adaptabilidad
- Flexibilidad
- Bajo costo
- Producción escalable
- Eficiencia energética
- Forma humana
- Implementación multiescenario
Su diseño suele destacar:
- Estructuras ligeras
- Actuadores integrados
- Sensores multimodales
- chips de IA
- Componentes estandarizados
- Materiales fabricables
- Cadenas de suministro con costes controlados
Tesla Optimus es un ejemplo representativo de esta dirección.
El objetivo no es construir el robot más extremo en todas las dimensiones de rendimiento.
El objetivo es construir un robot que pueda producirse a escala, implementarse ampliamente y mejorarse continuamente.
Para este camino, las prioridades de la cadena de suministro incluyen:
- Normalización
- Integración vertical
- Reducción de costos
- Producción en masa estable
- Eficiencia de la cadena de suministro al estilo de la electrónica de consumo
Robots especializados
Los robots especializados priorizan:
- Fiabilidad
- Precisión
- Durabilidad
- Rendimiento específico de la tarea
- Movilidad avanzada
- Capacidad para entornos hostiles
Sus cadenas de suministro dependen más de:
- Motores personalizados
- Reductores de precisión
- Sensores dedicados
- Materiales de alta resistencia
- Controladores especializados
- Personalización estructural
- Estricta validación de rendimiento
Boston Dynamics a menudo se asocia con este camino, especialmente en movilidad dinámica y desempeño en terrenos complejos.
Los robots especializados no son necesariamente baratos ni fáciles de producir en masa. Pero pueden realizar tareas difíciles en entornos específicos donde los robots de propósito general aún no son lo suficientemente buenos.
Diferencias en la cadena de suministro entre las dos estrategias
| Dimensión | Robots humanoides de uso general | Robots especializados |
|---|---|---|
| Demanda básica | Adaptabilidad, flexibilidad, bajo costo, escalabilidad. | Fiabilidad, precisión, durabilidad y rendimiento específico para tareas |
| Enfoque de diseño | Forma humana, estructura ligera, eficiencia energética. | Diseño funcional, resistencia estructural, fácil mantenimiento. |
| Selección de materiales | Uso equilibrado de aluminio, polímeros y composites. | Aleaciones de alto rendimiento, polímeros de ingeniería, materiales especiales. |
| Componentes principales | Actuadores integrados, sensores multimodales, chips AI | Motores, reductores, controladores y sensores dedicados personalizados |
| Característica de la cadena de suministro | Integración vertical, efecto de escala, superposición de electrónica de consumo | Requisitos de proceso estrictos, profesionales, personalizados, de alto valor. |
| Mejor ajuste | Amplios escenarios industriales y de servicios. | Escenarios de alta dificultad o alta confiabilidad |
Para los equipos de adquisiciones, esta distinción es importante.
Un proveedor adecuado para un robot de uso general puede no serlo para un robot especializado.
Es posible que un proveedor adecuado para prototipos no esté preparado para la producción en masa.
Aquí es donde muchas empresas de robots acabarán pagando tasas de matrícula. Matrículas caras.
Los escenarios de aplicación se están expandiendo
Manufactura Industrial
La fabricación industrial sigue siendo uno de los primeros mercados más importantes.
Los robots humanoides pueden soportar:
- Producción flexible
- Logística de fábrica
- Máquina atendiendo
- Asistencia de montaje
- inspección de calidad
- Tareas manuales repetitivas
Las fábricas son atractivas porque las tareas están más estructuradas y el retorno de la inversión se puede medir con mayor claridad.
Logística y Almacenamiento
La logística y el almacenamiento son otra dirección prometedora.
Las tareas potenciales incluyen:
- Clasificación
- Cargando
- Descarga
- Cosecha
- mover mercancías
- Tareas de transferencia repetitivas
Los almacenes a menudo implican un trabajo manual repetitivo, lo que los hace adecuados para el despliegue temprano de robots humanoides.
Trabajo en ambientes peligrosos
Los robots humanoides también se pueden utilizar en entornos peligrosos, como:
- Áreas de alta temperatura
- Ambientes tóxicos
- Respuesta a desastres
- Inspección de equipos peligrosos.
- Operación remota en lugares inseguros
En estos escenarios, el valor de reemplazar a los humanos no es sólo la eficiencia, sino también la seguridad.
Servicios Comerciales
Los escenarios de servicios comerciales pueden incluir:
- Orientación minorista
- Servicios hoteleros
- Servicios de exposición
- Educación y formación
- Recepción de visitantes
Estos escenarios requieren una buena interacción hombre-máquina, capacidad de lenguaje natural, movimiento estable y comportamiento seguro.
Servicios para el hogar
Las aplicaciones domésticas pueden incluir:
- Limpieza
- cuidado de ancianos
- Compañerismo
- Monitoreo de seguridad
- Asistencia doméstica sencilla
Sin embargo, los escenarios domésticos siguen siendo difíciles porque los usuarios esperan precios bajos, alta seguridad, poco ruido, batería de larga duración y gran adaptabilidad.
Una fábrica puede tolerar un robot que necesite apoyo de ingeniería.
Una familia probablemente no lo hará.

Qué significa esto para el abastecimiento de componentes
A medida que los robots humanoides avancen hacia la escala, la calidad de la cadena de suministro se convertirá en una ventaja decisiva.
Los compradores deben evaluar más que el precio unitario.
Los factores de abastecimiento importantes incluyen:
- Fiabilidad del ciclo de vida
- Trazabilidad del producto
- Soporte de ingeniería
- Estabilidad del tiempo de entrega
- Consistencia del lote
- Soporte de certificación
- Capacidad de personalización
- Compatibilidad con el diseño a nivel de sistema
- Estabilidad financiera de proveedores a largo plazo
En robótica, el componente más barato no siempre es el de menor coste.
Si una pieza de bajo costo causa fallas en el campo, retrasos en la producción o riesgos de seguridad, el costo real puede ser mucho mayor.
Áreas de abastecimiento de alta prioridad en 2026
Es probable que las siguientes categorías de componentes reciban gran atención por parte de los integradores y fabricantes de equipos originales de robots humanoides:
- Motores de alta densidad de par
- Actuadores conjuntos
- Reductores de precisión
- Reductores de microarmónicos
- Husillos de bolas micro
- Sensores de par
- Sensores de fuerza
- Sensores táctiles
- Sensores de visión
- IMU
- chips de IA
- MCU
- Dispositivos de energía
- Tableros de control
- PCB flexibles
- Conectores
- Arneses de cableado
- Componentes térmicos
- Compuestos de fibra de carbono
- Aleaciones de aluminio
- Aleaciones de titanio
- Polímeros de ingeniería
- Sistemas de baterías
- Módulos de administración de energía
- Módulos de carga
Entre ellos, son especialmente importantes los componentes manuales diestros, los módulos articulares, los sensores y la electrónica de control de IA.
Determinan si los robots humanoides pueden pasar de “máquinas interesantes” a “trabajadores útiles”.
Lista de verificación de adquisiciones para componentes de robots humanoides
Para los equipos de adquisiciones e ingeniería, la selección de proveedores debe incluir una evaluación tanto comercial como técnica.
Evaluación Técnica
- ¿El componente cumple con el par, la precisión, la carga y la velocidad de respuesta requeridos?
- ¿Se prueba el producto en condiciones de movimientos repetitivos?
- ¿Puede el proveedor proporcionar datos de confiabilidad?
- ¿Es el componente compatible con la arquitectura mecánica y eléctrica del robot?
- ¿Puede el producto soportar calor, vibración, flexión y ciclos de funcionamiento prolongados?
Evaluación de la cadena de suministro
- ¿Puede el proveedor respaldar la producción piloto y el crecimiento futuro del volumen?
- ¿Son estables los plazos de entrega?
- ¿Existe coherencia entre lotes?
- ¿Puede el proveedor proporcionar trazabilidad?
- ¿El proveedor admite la personalización?
- ¿Existe suficiente capacidad de comunicación de ingeniería?
Evaluación Comercial
- ¿El precio es adecuado para una futura ampliación?
- ¿Están claros los costos de herramientas y personalización?
- ¿Son razonables las condiciones de pago?
- ¿Puede el proveedor respaldar la documentación de exportación?
- ¿Existe una opción de suministro de respaldo?
Una cadena de suministro de robots humanoides no puede depender únicamente de la confianza de PowerPoint.
Necesita datos, muestras, pruebas y una gestión de proveedores aburrida pero útil.
Lo aburrido gana cuando comienza la producción.
Por qué China es importante en la cadena de suministro de robots humanoides
China tiene grandes ventajas en la fabricación de productos electrónicos, procesamiento mecánico, cadenas de suministro de motores, sensores, PCB, conectores, baterías y producción en masa al estilo de la electrónica de consumo.
Esto crea una base sólida para el suministro de componentes de robots humanoides.
Las ventajas clave incluyen:
- Denso ecosistema de proveedores
- Iteración de ingeniería rápida
- Gran flexibilidad de fabricación
- Estructura de costos competitiva
- Cadena de suministro de electrónica madura
- Capacidad de creación rápida de prototipos
- Crecientes marcas nacionales de robots y proveedores de componentes
Para los OEM e integradores globales, es probable que China siga siendo una importante base de abastecimiento de componentes de robots humanoides.
Sin embargo, la selección de proveedores debe ser cuidadosa.
El mercado incluirá tanto proveedores técnicos reales como proveedores “campeones de PowerPoint”. El primero construye robots. El segundo construye hermosos sueños.
Los equipos de adquisiciones necesitan verificar las capacidades mediante muestras, pruebas, referencias, sistemas de calidad y registros de producción.
Perspectivas futuras: de la demostración de robots a la competencia en la cadena de suministro
La industria de los robots humanoides aún está en sus inicios, pero la cadena de suministro ya se está volviendo más amplia y especializada.
La próxima etapa no será sólo una competencia entre marcas de robots.
También será una competencia entre cadenas de suministro.
Las empresas que puedan asegurar canales de componentes confiables desde el principio estarán mejor posicionadas a medida que la producción de robots humanoides pase de las pruebas piloto a la fabricación en mayor volumen.
Las capacidades más importantes incluirán:
- Suministro estable de componentes
- Colaboración rápida en ingeniería
- Reducción de costos a través de escala
- Control de calidad confiable
- Personalización flexible
- Fuerte verificación de proveedores
- Capacidad de abastecimiento y entrega global
En 2026, los robots humanoides no serán sólo una historia de IA.
También son una historia de fabricación, una historia de cadena de suministro y una historia de abastecimiento de componentes.
FAQ
¿Qué es la cadena de suministro de robots humanoides?
La cadena de suministro de robots humanoides incluye proveedores de componentes ascendentes, integradores de plataformas de robots intermedios y mercados de aplicaciones descendentes. Los componentes clave incluyen sensores, actuadores, motores, reductores, rodamientos, chips de IA, módulos de comunicación, sistemas de energía, materiales livianos, cableado, conectores y electrónica de control.
¿Por qué son importantes las manos diestras para los robots humanoides?
Unas manos diestras permiten a los robots humanoides agarrar, manipular e interactuar con objetos. Son esenciales para convertir a los robots humanoides de máquinas andantes en trabajadores útiles. Los componentes clave incluyen sensores táctiles, sistemas impulsados por tendones, sensores de torsión de articulaciones, controladores integrados, PCB flexibles, micromotores y microhusillos de bolas.
¿En qué etapa se encuentran actualmente los robots humanoides?
Muchos robots humanoides avanzados están pasando de habilidades atómicas generales G2 a habilidades operativas de extremo a extremo G3. Esto significa que los robots están progresando desde habilidades básicas reutilizables hacia el aprendizaje y la ejecución de tareas más completas.
¿Cuáles son los componentes más importantes de los robots humanoides?
Los componentes importantes incluyen actuadores de articulaciones, motores de alta densidad de par, reductores de precisión, sensores de par, sensores táctiles, chips de IA, MCU, tableros de control, PCB flexibles, mazos de cables, sistemas de baterías, módulos de administración de energía y materiales estructurales livianos.
¿Cuál es la diferencia entre robots humanoides de uso general y especializados?
Los robots humanoides de uso general se centran en la adaptabilidad, la escalabilidad, el bajo costo y los casos de uso amplios. Los robots especializados se centran en la confiabilidad, la precisión, la durabilidad y el desempeño de tareas específicas. Los requisitos de su cadena de suministro son diferentes.
¿Por qué es importante la calidad de la cadena de suministro para los robots humanoides?
Los robots humanoides requieren que muchos componentes de alta precisión funcionen juntos. La mala calidad de motores, sensores, reductores, PCB o sistemas de energía puede afectar la seguridad, la confiabilidad y la escalabilidad de la producción. La calidad de la cadena de suministro determina directamente si los robots pueden pasar de los prototipos